Hazardous Environment Robotics
Deneb Robotics, Inc., Auburn Hills, Michigan is an internationally known leader in 3D graphics-based factory simulation, telerobotics and virtual reality software used widely in the aerospace, automotive, defense, environmental, medical, nuclear and research communities.
Among the company's broad software product line is TELEGRIP™, which provides a 3D graphical interface for previewing, interactive programming and real-time bilateral control of remote robotic devices. It provides operators a system for safe, quick and efficient remediation of hazardous environments from a single point of control and input that is isolated from virtually all operator hazards.
Accurate 3D kinematic models of the robot and work space components allow the operator to preplan and optimize robot trajectories before the program is automatically generated. TELEGRIP can verify all geometries and dynamically update the model to adjust the environment in real-time. Control commands are monitored when running in autonomous, teleoperational or shared control modes to assure procedural safety.
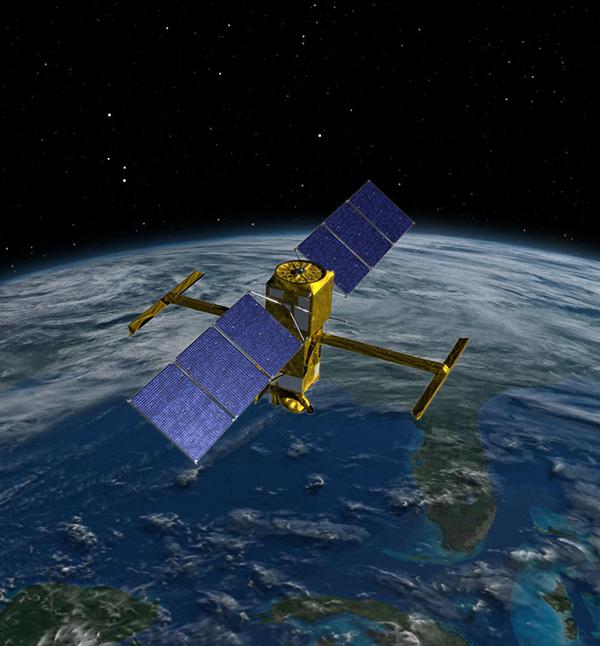
A key feature of TELEGRIP is a Video Overlay Option that utilizes video to calibrate 3D computer models with the actual environment. The video overlay technique is especially useful for on-line planning applications or teleoperations in remote, hazardous or complex environments such as space, undersea or nuclear sites. In such environments specific conditions may be unknown, or they may change suddenly while robotic operations are in progress; the advanced control capabilities provided by TELEGRIP enable ready adjustment to change.
The Video Overlay Option is the result of a technology sharing agreement with NASA's Jet Propulsion Laboratory (JPL). JPL developed a virtual reality calibration technique for reliable and accurate matching of a graphically-simulated environment in 3D geometry with actual video camera views. The system was designed for predictive displays with calibrated graphics that overlay in live video for telerobotics applications, for example, the system allows an operator to designate precise movements of a robot arm before sending the command to execute.
Following successful test of the video overlay techniques, JPL concluded a technology cooperation agreement with Deneb Robotics that allows the company to integrate Video Overlay into the commercially available TELEGRIP to expand its utility in hazardous environment robotics.
TELEGRIP is a trademark of Deneb Robotics, Inc.
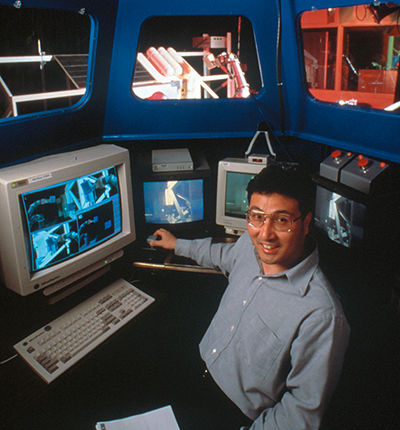
Dr. Won Soo Kim, TELEGRIP inventor, remotely operates a robot.
By selecting critical control points of reference, the operator and robot mate the robot's work cell movement paths.
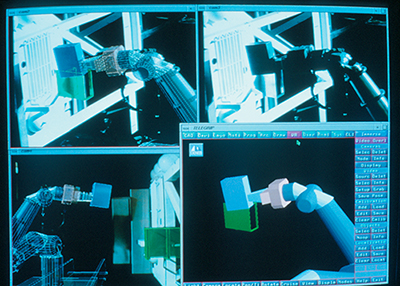
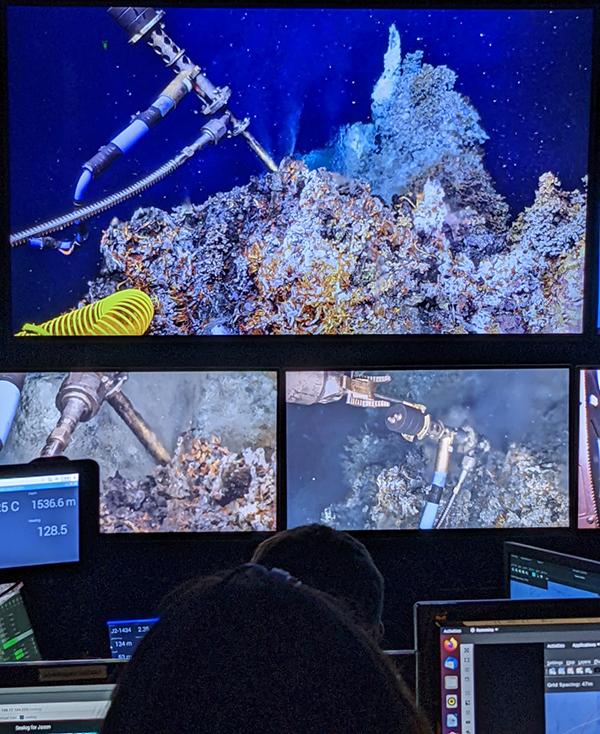
The operator can view the video image of the real world environment (upper right) and the computer's interpretation of the same scene uslng TELEGRIP
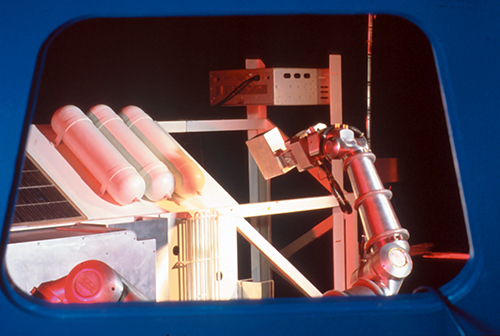
A video camera provides a Deneb engineer with a view of the robot.