Robot Handcontroller
Originally published in 1992
Body
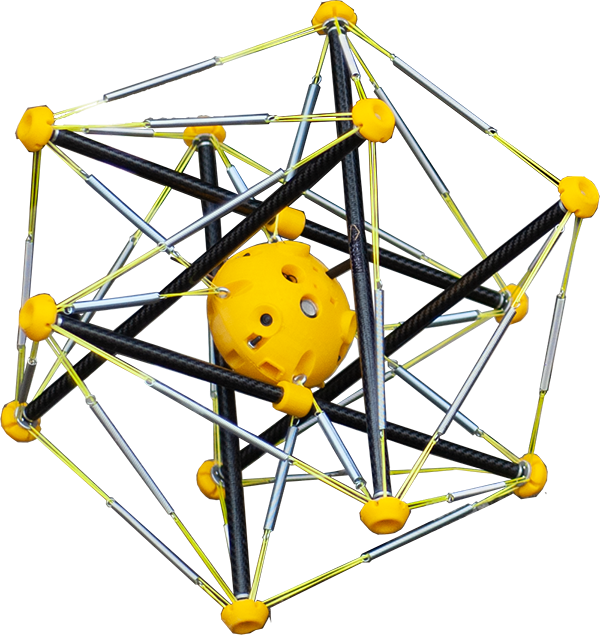
The PER-Force robotic handcontroller provides a sense of touch or feel to an operator manipulating robots. The force simulation and wide range of motion greatly enhances the efficiency of robotic and computer operations. The handcontroller was developed for the Space Station by Cybernet Systems Corporation under a Small Business Innovation Research (SBIR) contract. Commercial applications include underwater use, underground excavations, research laboratories, hazardous waste handling and in manufacturing operations in which it is unsafe or impractical for humans to work.
Full article: http://hdl.handle.net/hdl:2060/20020083311
Abstract
The PER-Force robotic handcontroller provides a sense of touch or feel to an operator manipulating robots. The force simulation and wide range of motion greatly enhances the efficiency of robotic and computer operations. The handcontroller was developed for the Space Station by Cybernet Systems Corporation under a Small Business Innovation Research (SBIR) contract. Commercial applications include underwater use, underground excavations, research laboratories, hazardous waste handling and in manufacturing operations in which it is unsafe or impractical for humans to work.
Robot Handcontroller
Robot Handcontroller