
Robotics Offer Newfound Surgical Capabilities
Originating Technology/NASA Contribution
Anyone who has ever worked on a car’s engine or tried to fix a sink knows the frustration of trying to perform precision work in a hard-to-reach place. Imagine how that sense of frustration might magnify when, instead of trying to wrap the head of a wrench around a leaky nut under the kitchen counter, the scenario involves conducting repairs on the International Space Station while floating nearly 200 miles above Earth. To ease this frustration, NASA funded work on autonomous robotic devices that would be able to retrieve tools and even crew outside of the station.
Partnership
Barrett Technology Inc., of Cambridge, Massachusetts, completed three Phase II Small Business Innovation Research (SBIR) contracts with Johnson Space Center. In 1989, the company worked with NASA on a Phase II to create a robotic arm, and in 1991, was again awarded a Phase II to create a hand. Nearly a decade later, the company was awarded a third Phase II for further miniaturization of the components that comprise the robotic devices.
Product Outcome
Barrett has developed and commercialized three core technologies that trace their roots directly back to the SBIR work with NASA. The first is a robotic arm, the whole-arm manipulation (WAM) system; the second is a hand that functions atop the arm, the BH8-Series; and the third is a motor driver that the company refers to as “the puck,” as it is similar in shape to a hockey puck, but one-tenth the size.
The SBIR work with NASA led to the development of the first commercially available cable-driven robot, a distinction that earned Barrett a place in the “Guinness World Records” book as the world’s most advanced robotic arm. Designed for applications that require superior adaptability, programmability, and dexterity, the WAM can reach around large objects and grasp them with its arm links like huge fingers, while conventional robotic arms are restricted to hand end-effectors, and thus restricted to grasping smaller objects. The WAM has other advantages over traditional robotic arms, in that it uses gear-free cables to manipulate its joints, allowing it to feel and control subtle forces.
The arm consists of a shoulder that operates on a gearless differential mechanism, an upper arm, and a gear-free elbow, forearm, and wrist. This arrangement of joints coincides with the human shoulder and elbow, but with much greater range of motion. Like a person’s arm, but unlike any industrial robotic arm, the WAM Arm is backdriveable, meaning that any contact force along the arm or its hand is immediately felt at the motors, supporting graceful control of interactions with walls, objects, and even people. With a human-scale 3-foot reach, it is so quick that it can grab a major-league fastball, yet so sensitive that it responds to the gentlest touch. The WAM Arm is available in two main configurations, four-degrees-of-freedom and seven-degrees-of-freedom, both with human-like kinematics. Internally protected channels allow the user to pass electric lines and fiber optics required for custom end-effectors and sensors.
These characteristics make it ideal for myriad applications, including in space, where use of robots is often safer than people, in manufacturing, and in medicine.
Recently, an adaptation of the WAM has been cleared by the U.S. Food and Drug Administration for use in a minimally invasive knee surgery procedure, where its precision control makes it ideal for inserting a very small implant. Barrett Technology licensed the arm to MAKO Surgical Corporation, of Fort Lauderdale, Florida, for use in the company’s “keyhole” orthopedic surgery procedures.
The company uses small titanium knee implants instead of the more common and more traumatic total-knee replacement, thus limiting surgery to only the diseased part of the bone. These surgeries, however, require an array of complex implant shapes to cover the variety of disease patterns and bone geometries. To insert these devices, surgeons generally cut small pockets into the diseased bone with a high-speed, hand-held cutting device. While lacking in robotic precision, this technique provides the surgeon with the tactile sensation of the cutting, which in turn provides a wealth of intuitive information about the diseased bone that is not available from preoperative X-rays.
The WAM-based technologies combine the best of a surgeon’s intuition and a robot’s precision through active haptics (touch sensing). The WAM Arm improves the precision of the implant pockets while still allowing the surgeon to feel bone condition. Matching pocket and implant geometries minimizes trauma, ensures secure implant retention, and optimizes resulting joint functionality.
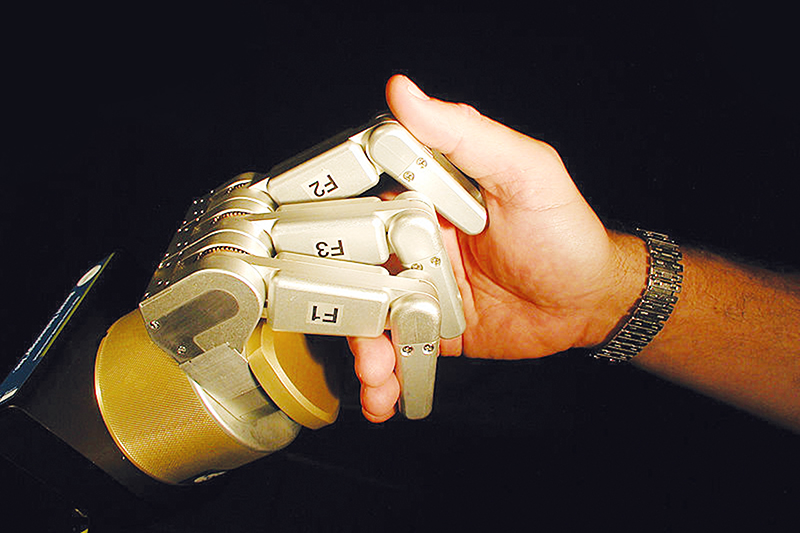
Like the WAM Arm, the BH8-262 BarrettHand offers many benefits in dexterity. A multifingered programmable grasper, the BarrettHand can pick up objects of different sizes, shapes, and orientations. According to the company, integrating this device immediately multiplies the value of any arm requiring flexible automation. Even with its low weight (1.18kg) and compact form, it is totally self-contained. Plus, communicating by industry-standard serial communications, integration with any robotic arm is fast and simple.
The BarrettHand BH8-Series neatly houses a CPU, software, communications electronics, servo-controllers, and four brushless motors. Of its three multijointed fingers, two have an extra degree of freedom with 180 degrees of synchronous lateral mobility supporting a large variety of grasp types.
Barrett’s Ultra-Miniature Puck Brushless Servo Electronics Module, or “Puck,” is the world’s smallest and most power-efficient, high-performance servomotor controller. It is based on the work done with NASA, as well as grants from the U.S. Department of Energy and the National Science Foundation (NSF). Barrett has been shipping the Pucks in all of its robotic WAM Arms for the past 3 years, because the device offers several distinct advantages: the absence of a controller cabinet improves reliability and portability; the incredibly low power consumption (an order of magnitude less than any other arm in its class) increases safety and portability, while also making the device “greener;” and the ultra-high brushless-servo performance enables applications such as force-field-enabled medical surgery.
While the Puck is not currently available outside the WAM Arm today, Barrett has applied for NSF funding to develop features to make this module universally adaptable within 3 years to a wide range of brushless-servomotor applications.
WAM™, BarrettHand™, and Puck™ are trademarks of Barrett Technology Inc.

The BarrettHand is a multifingered programmable grasper with the dexterity to secure target objects of different sizes, shapes, and orientations.
The BarrettHand offers unmatched versatility, programmability, and ease of integration with commercial robotic arms, including the Barrett WAM Arm.